
ロボットの動きを極める!緩旋回・真地旋回・超真地旋回について
必殺!超真地旋回!
皆さんは『超真地旋回(ちょうしんちせんかい)』という言葉を知っていますか?
何かの必殺技みたいですが、実はこれ、ロボットや車に関する用語なんです!
同じような用語として、
- 緩旋回(かんせんかい)
- 真地旋回(しんちせんかい)
もあるので、まとめて解説します👩🎓
緩旋回(かんせんかい)
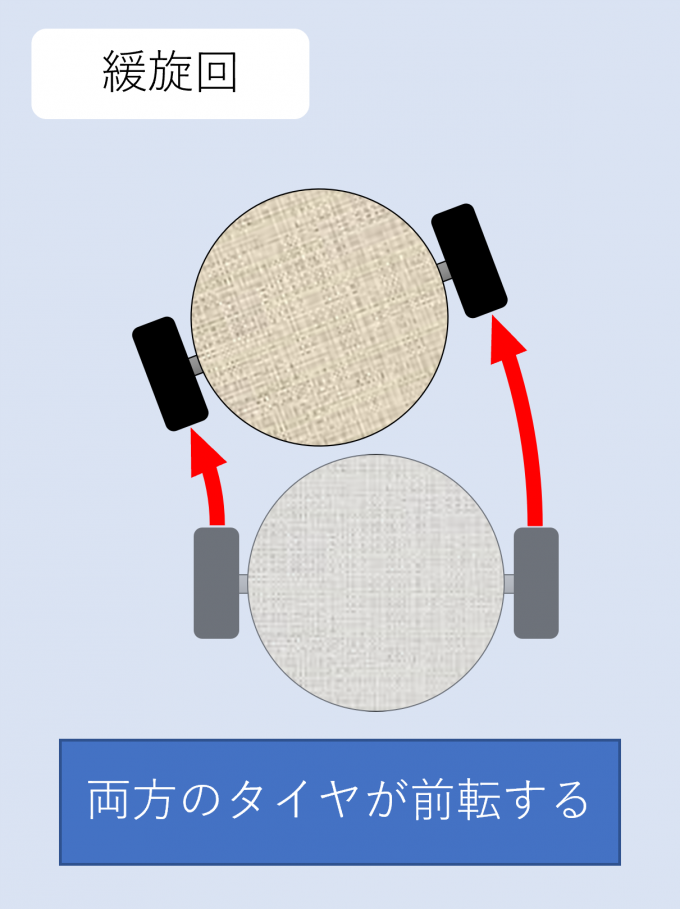 緩旋回は2つのタイヤがどちらも前転します。
緩旋回は2つのタイヤがどちらも前転します。
この回転速度をわずかにずらすことで、移動と方向転換を同時に行うことができます。
真地旋回(しんちせんかい)
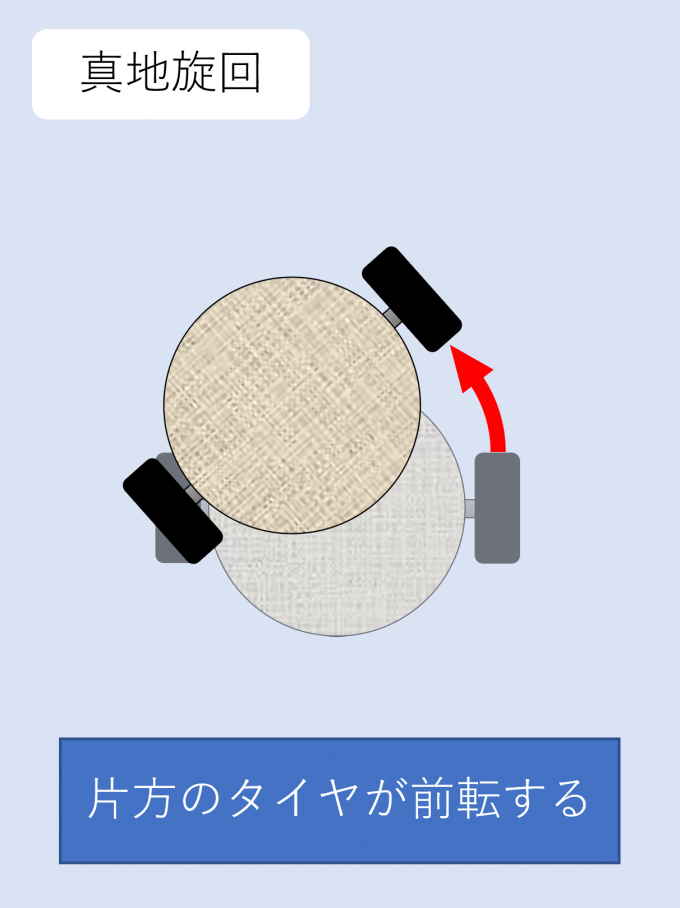 真地旋回は片方のタイヤを完全に停止させて方向転換を行います。
真地旋回は片方のタイヤを完全に停止させて方向転換を行います。
停止したタイヤが軸足となり、緩旋回よりも小さな回転半径を実現できます。
超真地旋回(ちょうしんちせんかい)
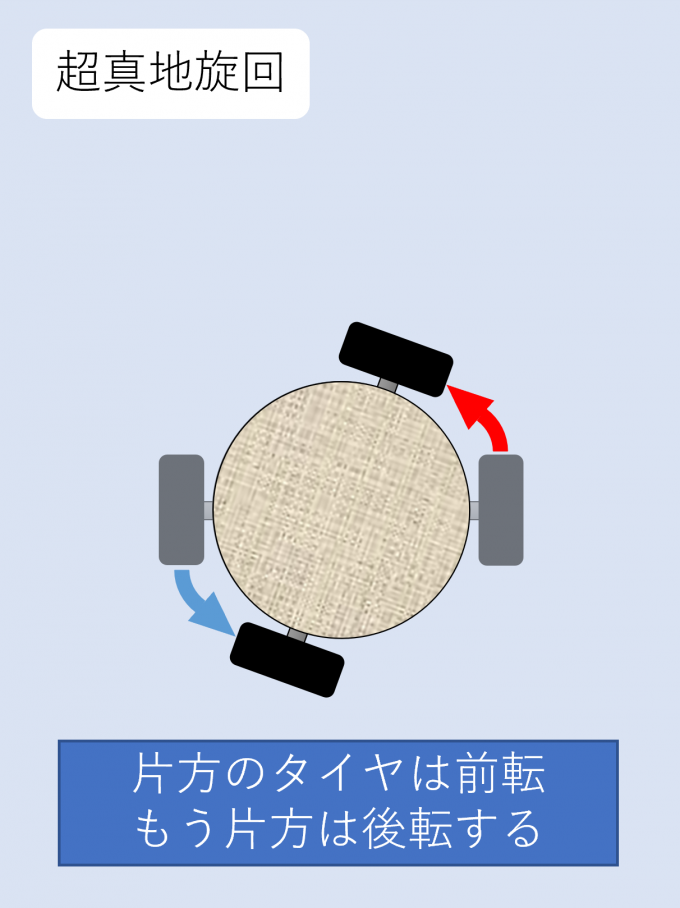
超真地旋回は、2つのタイヤの回転方向を逆にして回します。
回転速度が同じだと、完全にその場で回転することができます。
機動性は高まりますが、トランスミッション(ギヤ機構)が複雑になるというデメリットがあります。
まとめ
これら3つの旋回方法をまとめて見てみましょう。
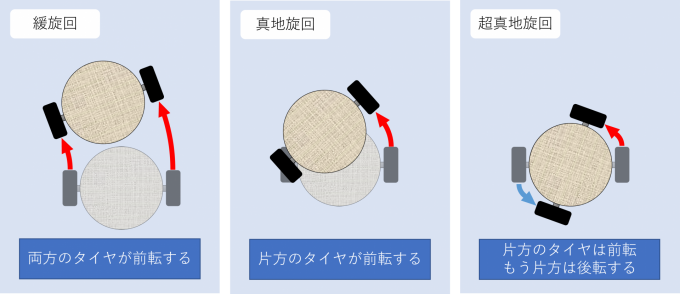
広いところでは視点がゆっくり変化する緩旋回、狭いところでは超真地旋回、と使い分けるのが良いですね👍
マイコンをコントローラーにして動かす
人工知能学科で使用している2足歩行ロボット『PLEN:bit(プレン・ビット)』をコントロールしてみます。
動きやすいように、足にタイヤを付けました✨
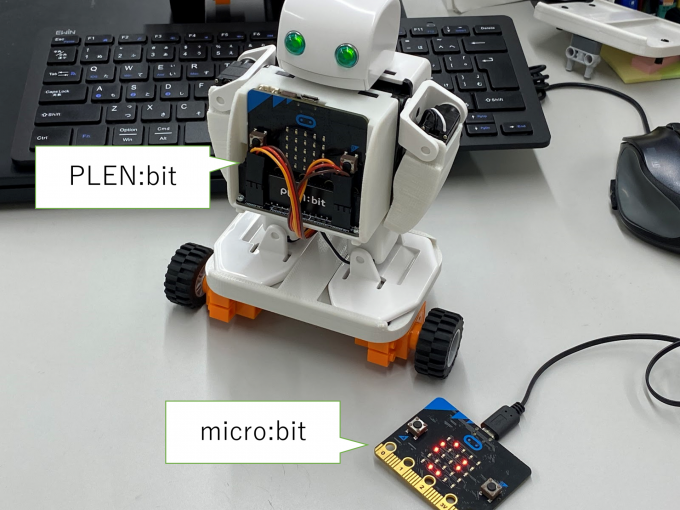
コントローラーにはプログラミングの授業で使うマイコン、『micro:bit(マイクロ・ビット)』を使用しました!
micro:bitには、加速度センサー(傾きセンサー)が搭載されています。このセンサーで前後・左右の傾きを検出し、その値を無線でPLEN:bitに送信します。
コントローラーの前後・左右の傾きを、プログラミングで2つのタイヤの前転・後転に適用すれば、ラジコン操作が実現できます🚌
ロボットはコントロール性が超大事!

例えば、スプラトゥーンというゲームでは、キャラクターの移動は左のスティック、左右の視点移動は右のスティックの合計2本で動かしています。
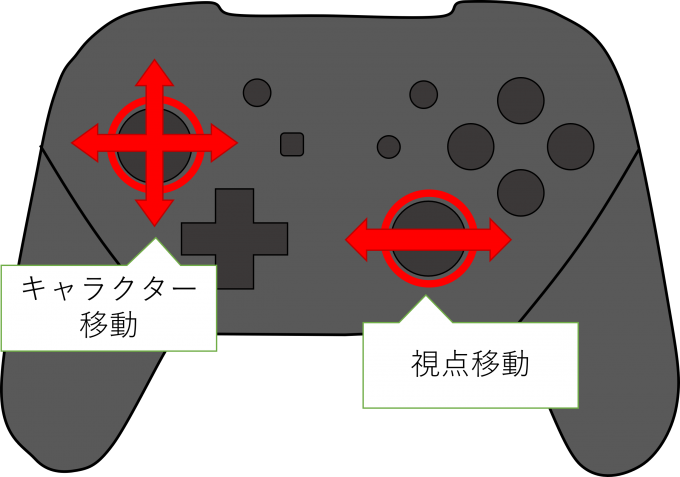
スティック1本だと、緩旋回のように移動と方向転換が一緒になり、急に振り向いたりすることができません。
少なすぎると操作しにくいし、多すぎると直感的じゃなくなる。。。バランスが大切なのです!
最後に
AIを活躍させるためにはハードウェアの知識も重要です!
大阪ハイテクの人工知能学科では、AIのことだけでなく、機械・電気などのハードウェアの知識を身につける授業もあります🤖
プログラミングでAIを組み、AIによってロボットを制御する、そんなAI & ロボット技術者を目指したい皆さんを応援します🏁
ぜひ、オープンキャンパスでお待ちしておりますね✨

